Australian Rover Challenge
Australian Rover Challenge
21 - 24 March 2024
EXTERRES Analogue Facility
Roseworthy Campus / South Australia


The Mission
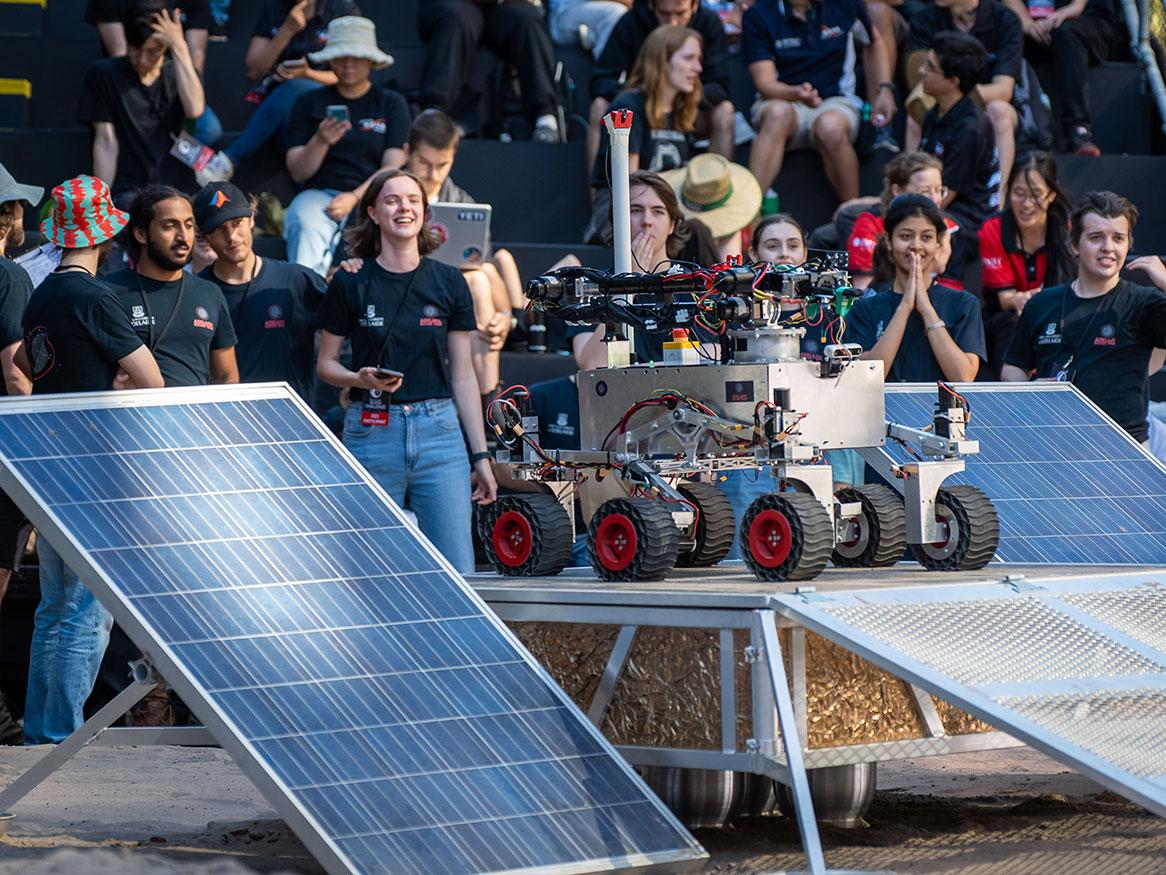
The Australian Rover Challenge (ARCh) is an annual robotics competition held by the University of Adelaide, where university students from across Australia and around the globe, battle it out in a full-scale Lunar mission, using semi-autonomous rovers that they have designed and built themselves.
Competitors showcase their skills in a custom built simulated lunar environment, and complete a range of tasks including navigation, resource, and construction. Unlike many other rover competitions across the world which focus on Martian exploration, the ARCh is focused specifically on completing tasks on a simulated Lunar surface.
Watch live streams
Day 1
21/03/2024
Day 2
22/03/2024
Day 3
23/03/2024
Day 4
24/03/2024
Registrations for the 2024 Australian Rover Challenge have now closed.
The rules and requirements document is now available to view:
The SAR guidelines are now available to review:





Congratulations to the 2024 Australian Rover Challenge winners!

Project Scorpio
First place

Monash Nova Rover
Second place

UQ Space
Third place
Australian Rover Challenge partners
Premier Partners:

Major Partner:
Supporting Partners:
Event Supporter:

